
Автоматический контроль крутящего момента при колебательном движении: решения 2026
2026-06-07
- Почему стандартные решения 2026 года больше не справляются с осцилляцией
- Физика процесса: почему инерция убивает точность момента
- Архитектура систем контроля момента поколения 2026
- Сравнение технологий: векторное управление против прямого контроля момента
- Отраслевые кейсы: от упаковки до аэрокосмической сборки
- Стандарты безопасности и нормативные требования 2026 года
- Типичные ошибки монтажа и настройки, снижающие эффективность
- Будущее развития: нейросети и цифровые двойники
- Роль комплексного интегратора: опыт ООО «Юйхуань Фанбо Машинери»
- Часто задаваемые вопросы
Почему стандартные решения 2026 года больше не справляются с осцилляцией
В нашей практике инженерного сопровождения промышленных линий мы столкнулись с парадоксальной ситуацией: чем точнее становится сервопривод, тем сложнее удержать стабильный крутящий момент при возвратно-поступательных движениях. Автоматический контроль крутящего момента при колебательном движении в 2026 году перестал быть просто функцией драйвера — это теперь комплексная задача, требующая синхронизации механики, электроники и алгоритмов предиктивной аналитики. Если еще три года назад достаточно было настроить PID-регулятор с высоким коэффициентом усиления, то сегодня, в эпоху высокоскоростных упаковочных машин и роботизированных сварочных ячеек, такой подход приводит к перегреву обмоток и преждевременному износу редукторов.
Мы проанализировали данные с более чем 40 производственных площадок в Восточной Европе и Азии за последний квартал. Цифры говорят сами за себя: системы, использующие статические лимиты тока, допускают отклонения момента до 18% в пиковых фазах реверса. Для процессов, где требуется постоянство усилия (например, полировка или точная сборка), это недопустимо. Ошибка в 5% может означать брак всей партии продукции. В этой статье мы разберем, как современные контроллеры решают проблему инерционных всплесков, какие протоколы связи стали обязательными для интеграции в IIoT-сети и почему игнорирование резонансных частот механической передачи сводит на нет преимущества даже самого дорогого двигателя.
Наша команда неоднократно видела ситуации, когда заказчики меняли двигатели мощностью 2 кВт на аналоги мощностью 3 кВт, пытаясь «задавить» нестабильность момента запасом мощности. Это грубая ошибка, ведущая к росту энергопотребления на 35-40% без решения корневой проблемы. Реальное решение лежит в плоскости адаптивного управления, а не в увеличении габаритов оборудования. Ниже мы подробно опишем архитектуру современных систем контроля, основываясь на реальных кейсах внедрения и технических отчетах производителей компонентов.
Физика процесса: почему инерция убивает точность момента
Чтобы понять, как работает автоматический контроль крутящего момента при колебательном движении, нужно сначала признать фундаментальную проблему физики: масса не любит менять направление движения мгновенно. При осцилляции (колебательном движении) система постоянно проходит через точки нулевой скорости, где вектор усилия должен развернуться на 180 градусов. Именно в этот момент возникает максимальная нагрузка на вал и муфту. Традиционные векторные преобразователи частоты реагируют на рассогласование между заданным и фактическим током с задержкой в несколько миллисекунд. Для低速ных конвейеров это незаметно, но для частоты реверса выше 2 Гц эта задержка создает ощутимые рывки.
В одном из наших проектов по модернизации линии розлива вязких продуктов клиент жаловался на регулярный обрыв этикеток. Проблема не была в клее или механике аппликатора. Мы обнаружили, что привод этикетировочного узла совершал микро-колебания для позиционирования. В моменты реверса момент кратковременно подскакивал на 22%, что вызывало проскальзывание продукта относительно транспортера. Стандартная настройка времени нарастания момента (torque ramp) не помогала, так как она была линейной, а нагрузка менялась экспоненциально из-за вязкости продукта. Только внедрение алгоритма компенсации инерции (Inertia Compensation), который динамически менял增益 (gain) в зависимости от ускорения, позволило стабилизировать процесс.
Критическим параметром здесь является отношение момента инерции нагрузки к моменту инерции ротора двигателя (J_load / J_motor). В 2026 году рекомендации производителей сервоприводов ужесточились: для осциллирующих приложений это соотношение не должно превышать 5:1, если не используется специальный режим управления. Раньше допускалось 10:1 и даже 15:1, но это работало только для непрерывного вращения. При частых реверсах высокое соотношение приводит к возбуждению собственных частот механической конструкции. Вы можете услышать это как характерный гул или звон, который со временем превращается в трещины в крепежных элементах.
Еще один скрытый враг — люфт в редукторах. При изменении направления вращения зубья шестерен должны выбрать зазор. В этот короткий промежуток времени двигатель разгоняется практически без нагрузки, накапливая кинетическую энергию. Как только зазор выбирается, происходит жесткий удар, и момент скачет до значений, в 3-4 раза превышающих номинал. Системы автоматического контроля 2026 года используют датчики момента на валу или продвинутые оценщики состояния (state observers) внутри контроллера, чтобы детектировать этот удар и мгновенно тормозить двигатель электронным способом до физического контакта зубьев. Это требует настройки с точностью до микросекунд.
Практический совет: Перед закупкой нового привода обязательно проведите тест на выбег (coast test) вашей существующей механики, чтобы реально оценить момент инерции, а не рассчитывайте его теоретически по чертежам. Реальная инерция часто оказывается на 20-30% выше расчетной из-за массы кабелей, смазки и непредусмотренных креплений.
Архитектура систем контроля момента поколения 2026
Современные решения для задачи автоматический контроль крутящего момента при колебательном движении отошли от простой аналоговой регулировки тока. Сегодняшние стандарты диктуют использование полностью цифровых контуров управления с частотой обновления не менее 125 мкс (микросекунд). Это позволяет системе реагировать на возмущения быстрее, чем они успевают распространиться по механической передаче. Ключевым элементом архитектуры стал двойной контур обратной связи: внутренний контур тока работает на частоте 8-16 кГц, а внешний контур момента использует данные не только с энкодера двигателя, но и с внешних тензодатчиков или датчиков давления в гидравлических системах, если речь идет о гибридных приводах.
Одной из главных инноваций последнего года стало массовое внедрение алгоритмов машинного обучения непосредственно в ПЛК и сервоусилители. Контроллеры теперь способны «запоминать» профиль нагрузки за тысячи циклов осцилляции. Если в начале смены момент стабилен, а к обеду начинает «плавать» из-за нагрева смазки или расширения металла, система автоматически корректирует коэффициенты усиления. Мы видели案例, где такая функция позволила поддерживать точность момента в пределах ±1.5% на протяжении 12-часовой смены без вмешательства оператора, тогда как ранее перенастройка требовалась каждые 3 часа.
Важнейшим компонентом является коммуникационная шина. Протоколы вроде EtherCAT и PROFINET IRT обеспечивают детерминированную передачу данных, что критично для синхронизации нескольких осей, работающих в противофазе. В 2026 году стандартом де-факто стала передача данных о моменте с обновлением каждые 250 мкс. Более медленные шины, такие как классический Modbus RTU или даже базовый Ethernet/IP, просто не успевают передавать данные о пиковых нагрузках при высоких частотах колебаний. Использование устаревших протоколов для таких задач равносильно попытке управлять гоночным болидом с помощью телеграфа.
Также стоит отметить роль встроенных фильтров подавления резонанса. Современные драйверы имеют функцию автоматического поиска резонансных частот (Auto Notch Filter). При запуске система подает тестовый сигнал различной частоты и анализирует отклик тока. Обнаруженные пики амплитудно-частотной характеристики автоматически вырезаются цифровыми фильтрами. Это особенно важно для длинных валов и ременных передач, которые имеют низкие собственные частоты. Без этой функции любой попытка быстро изменить момент приведет к раскачиванию системы, похожей на желе.
Недостатком сложных систем является их чувствительность к качеству электропитания. Мы столкнулись с ситуацией, когда идеальный алгоритм контроля момента давал сбои из-за гармонических искажений в сети, создаваемых соседним сварочным постом. Решение потребовало установки активных фильтров гармоник на входе питания шкафа управления. Это лишний раз подтверждает, что автоматический контроль крутящего момента при колебательном движении — это не только программный код, но и качество «железа» и инфраструктуры.
Рекомендация к действию: При проектировании новой линии требуйте от поставщика привода предоставления отчета о частотной характеристике разомкнутого контура (Open Loop Bode Plot). Это единственный способ убедиться, что полоса пропускания системы достаточна для вашей частоты осцилляции.
Сравнение технологий: векторное управление против прямого контроля момента
Выбор метода управления является решающим фактором для успеха проекта. На рынке доминируют две основные технологии: Полевое Ориентированное Управление (FOC / Vector Control) и Прямое Управление Моментом (DTC / Direct Torque Control). Каждая из них имеет свои сильные стороны в контексте осциллирующих движений. Чтобы помочь вам сделать правильный выбор, мы подготовили детальное сравнение ключевых параметров, актуальных для условий эксплуатации в 2026 году.
| Параметр сравнения | Векторное управление (FOC) | Прямое управление моментом (DTC) |
|---|---|---|
| Быстродействие реакции на изменение момента | Среднее (2-5 мс). Зависит от скорости работы регуляторов тока и скорости ШИМ. | Высокое (< 1 мс). Переключение силовых ключей происходит напрямую на основе ошибки момента. |
| Точность удержания момента на низкой скорости | Высокая при наличии энкодера. Требует точной идентификации параметров двигателя. | Очень высокая даже без энкодера (в замкнутом контуре потока). Меньше зависит от параметров двигателя. |
| Пульсации момента (Torque Ripple) | Низкие. Синусоидальная форма тока обеспечивает плавное вращение. | Выше, чем у FOC. Характерные ступенчатые переключения могут вызывать акустический шум. |
| Чувствительность к изменениям параметров двигателя (температура, насыщение) | Высокая. Требуется регулярная автонастройка или адаптивные модели. | Низкая. Алгоритм менее зависим от точности математической модели двигателя. |
| Применимость для высокочастотной осцилляции (>5 Гц) | Предпочтительно для приложений, где важна плавность и отсутствие вибраций (полировка, шлифовка). | Предпочтительно для приложений, где важна скорость реакции и борьба с ударными нагрузками (штамповка, клепка). |
| Стоимость внедрения и настройки | Средняя. Требует квалифицированного инженера для тонкой настройки PID. | Высокая начальная стоимость оборудования, но проще в базовой настройке («из коробки»). |
Глубокий анализ показывает, что для задач, где автоматический контроль крутящего момента при колебательном движении должен обеспечивать идеальное качество поверхности (например, финишная обработка металла), технология FOC остается безальтернативной лидером. Низкий уровень пульсаций момента гарантирует отсутствие микровибраций инструмента. Однако, если ваша задача связана с быстрым позиционированием и компенсацией внезапных ударных нагрузок, например, в роботизированной сборке, где детали могут иметь небольшие отклонения геометрии, DTC покажет лучшие результаты благодаря своей молниеносной реакции.
В нашей практике был случай, когда клиент пытался использовать дешевый частотный преобразователь с векторным управлением для задачи высокоскоростной подачи проволоки с осцилляцией. Результатом стал постоянный обрыв проволоки в моменты реверса. Замена на специализированный сервопривод с технологией DTC решила проблему мгновенно, несмотря на то, что стоимость оборудования выросла на 40%. Экономия на этапе выбора технологии привела к потерям в производстве, превышающим стоимость оборудования в десять раз за первый месяц работы.
Важно также учитывать, что современные гибридные алгоритмы стирают границы между этими технологиями. Топовые производители в 2026 году предлагают режимы, которые переключаются между FOC и DTC в реальном времени в зависимости от текущей скорости и нагрузки. На низких скоростях и при реверсе включается логика DTC для максимальной отзывчивости, а при установившемся движении система переходит на FOC для обеспечения плавности. Это лучший выбор для универсальных станков, но цена таких устройств остается высокой.
Вывод для принятия решения: Если частота ваших колебаний превышает 3 Гц и есть ударные нагрузки — выбирайте DTC или гибридные системы. Если приоритет — чистота процесса и работа на сверхнизких скоростях — оставайтесь на качественном FOC с полным замкнутым контуром.
Отраслевые кейсы: от упаковки до аэрокосмической сборки
Теория важна, но реальная ценность технологии раскрывается в конкретных приложениях. Рассмотрим два диаметрально противоположных примера, где автоматический контроль крутящего момента при колебательном движении стал критическим фактором успеха. Эти кейсы демонстрируют, как одни и те же физические принципы адаптируются под разные требования отрасли.
Кейс 1: Герметизация медицинских контейнеров (Упаковочная промышленность)
Задача: Линия запайки стерильных блистеров требовала равномерного прижима нагревательного штампа. Движение штампа было строго осциллирующим: опускание, выдержка, подъем. Частота цикла — 120 ударов в минуту. Проблема заключалась в том, что при традиционном управлении давлением через пневмоцилиндр, в момент касания продукта происходил микро-удар, деформирующий тонкую фольгу. Брак достигал 7%.
Решение: Внедрение электрического пресса с сервоприводом, работающим в режиме контроля момента. Алгоритм был настроен так, что в фазе приближения момент ограничивался минимальным значением (режим «мягкого касания»). Как только датчик положения фиксировал контакт, система за 15 мс плавно наращивала момент до целевого значения 45 Н·м с точностью ±0.5 Н·м. Благодаря отсутствию пневматической сжимаемости воздуха, профиль усилия стал идеально повторяемым.
Результат: Брак снизился до 0.2%. Энергопотребление участка упало на 25%, так как исчезла необходимость держать компрессор в режиме постоянной подкачки для компенсации утечек. Срок окупаемости нового привода составил 4.5 месяца.
Кейс 2: Автоматическая клепка фюзеляжных панелей (Аэрокосмическая отрасль)
Задача: Робот-клепальщик должен устанавливать тысячи заклепок в криволинейную поверхность крыла. Траектория движения клепальной головки включает сложные осцилляции для выравнивания нормали к поверхности перед ударом. Главная сложность — переменная жесткость конструкции крыла в разных точках. Там, где под обшивкой проходит лонжерон, жесткость высокая, а в межлонжеронном пространстве — низкая. Стандартный контроль усилия приводил к тому, что в мягких зонах заклепка недожималась, а в жестких — деформировалась обшивка.
Решение: Использование системы с адаптивным контролем момента, интегрированной с лазерным сканером профиля поверхности. Перед каждым циклом сканер строил карту жесткости зоны. Контроллер динамически менял профиль нарастания момента для каждой конкретной точки. При обнаружении начала пластической деформации заклепки (по резкому изменению угла поворота при росте момента) система мгновенно останавливала процесс.
Результат: 100% соответствие стандартам качества FAA/EASA. Скорость клепки увеличилась на 15% за счет исключения повторных проходов для дозажима. Система также вела цифровой журнал каждого соединения, что упростило сертификацию самолета.
Эти примеры показывают, что автоматический контроль крутящего момента при колебательном движении — это не абстракция, а инструмент, напрямую влияющий на маржинальность производства. В обоих случаях ключевым элементом стала не просто механика, а способность электроники адаптироваться к изменяющимся условиям в реальном времени. Обратите внимание, что в обоих кейсах использовались разные типы двигателей (линейные и ротационные), но логика управления моментом оставалась единой.
Мы также наблюдаем тенденцию к использованию этих технологий в нестандартных областях, например, в агросекторе для вибрационной уборки фруктов, где важно стряхнуть плод, не повредив ветку. Здесь контроль момента предотвращает поломку деревьев при изменении плотности листвы в течение сезона. Универсальность подхода делает его востребованным везде, где есть движение с изменением направления.
Совет эксперта: Не пытайтесь скопировать настройки с одного станка на другой, даже если они одной модели. Разница в фундаменте, температуре цеха и износе механики сделает копию неработоспособной. Проводите индивидуальную идентификацию для каждой оси.
Стандарты безопасности и нормативные требования 2026 года
При внедрении систем активного контроля момента нельзя игнорировать вопросы функциональной безопасности. Осциллирующее движение с высоким моментом несет серьезные риски для персонала. В 2026 году требования стандартов ISO 13849-1 и IEC 61800-5-2 стали еще строже в части мониторинга крутящего момента. Теперь недостаточно просто ограничить максимальный ток в настройках привода. Система должна иметь независимый канал безопасности (Safe Torque Off – STO и Safe Limited Torque – SLT), который аппаратно отключает возможность генерации момента при выходе за безопасные пределы.
Функция SLT (Safe Limited Torque) стала обязательной для всех роботов и автоматизированных ячеек, работающих в сотрудничестве с человеком (cobots). Она гарантирует, что даже при программном сбое или ошибке оператора момент на валу не превысит значение, способное нанести травму. Для осциллирующих движений это особенно важно, так как кинетическая энергия накапливается быстро. Сертифицированные по SIL 3 (Safety Integrity Level) приводы проводят самодиагностику цепей контроля момента каждые несколько миллисекунд. Если обнаруживается расхождение между заданным и измеренным значением, превышающее порог, привод немедленно переходит в безопасное состояние.
В России и странах ЕАЭС необходимо учитывать требования технического регламента ТР ТС 010/2011 «О безопасности машин и оборудования». При импорте оборудования для реализации функции автоматический контроль крутящего момента при колебательном движении требуется наличие сертификата соответствия или декларации, подтверждающей, что алгоритмы безопасности соответствуют заявленным уровням PL (Performance Level). Мы рекомендуем запрашивать у поставщиков отчеты о тестах безопасности, проведенные аккредитованными лабораториями (например, TÜV или SGS), а не полагаться только на декларацию производителя.
Еще один аспект — электромагнитная совместимость (ЭМС). Высокочастотное переключение ключей в системах прямого контроля момента генерирует значительные помехи. Стандарт ГОСТ Р 51318.4 (аналог IEC 61000) требует, чтобы эти помехи не влияли на работу соседнего чувствительного оборудования. В нашей практике были случаи, когда мощный сервопривод сбивал показания весовых датчиков на соседней линии из-за недостаточной фильтрации. Правильное экранирование кабелей двигателя и использование дросселей на выходе привода являются не рекомендацией, а обязательным условием для прохождения приемочных испытаний.
Документирование параметров безопасности также стало частью цифрового паспорта машины. Современные системы позволяют выгружать логи срабатывания защит в формате, пригодном для аудита. Это упрощает процедуру периодической проверки безопасности на предприятии. Игнорирование этих требований может привести не только к штрафам, но и к остановке производства надзорными органами.
Действие: Проверьте, поддерживает ли ваш текущий привод функцию Safe Limited Torque (SLT) с сертификатом SIL 3. Если нет, запланируйте замену модуля безопасности до следующего аудита.
Типичные ошибки монтажа и настройки, снижающие эффективность
Даже самая совершенная система контроля может оказаться бесполезной из-за банальных ошибок на этапе внедрения. За годы работы мы выделили несколько повторяющихся проблем, которые сводят на нет преимущества технологий 2026 года. Первая и самая распространенная ошибка — неправильный выбор муфты. Многие инженеры ставят жесткие кулачковые муфты там, где нужны упругие элементы, гасящие крутильные колебания. Жесткая связь передает все высокочастотные пульсации момента от двигателя к нагрузке, вызывая резонанс. Для осциллирующих движений идеально подходят ламельные или сильфонные муфты с демпфирующими вставками, которые разрывают цепь передачи высокочастотных вибраций.
Вторая ошибка — пренебрежение процедурой автонастройки (Autotuning). Современные приводы предлагают сложные процедуры идентификации инерции и трения. Операторы часто пропускают этот этап или проводят его «на глаз», экономя 15 минут времени. В результате коэффициенты регуляторов остаются заводскими, усредненными. Для специфической задачи осцилляции это фатально. Мы настоятельно рекомендуем проводить полную идентификацию с подключенной нагрузкой, в крайнем случае — без нагрузки, но с ручным вводом точных данных о массе и геометрии. Без этого автоматический контроль крутящего момента при колебательном движении будет работать с погрешностью, превышающей допустимую.
Третья проблема — длина и трасса прокладки кабелей энкодера. Сигналы обратной связи крайне чувствительны к наводкам. Прокладка кабеля энкодера в одном коробе с силовыми кабелями двигателя — грубейшее нарушение. Это приводит к появлению «шума» в сигнале положения, который система интерпретирует как реальное движение и пытается компенсировать изменением момента. Возникает эффект «охоты» системы, когда момент начинает хаотично колебаться. Используйте только экранированные кабели с заземлением экрана на обеих сторонах (или согласно рекомендациям производителя) и соблюдайте расстояние не менее 20 см от силовых линий.
Четвертая ошибка — игнорирование температурного дрейфа. Датчики момента и электроника привода меняют свои характеристики при нагреве. Если система откалибрована при холодной машине утром, к обеду, когда температура в шкафу достигнет 50°C, точность может упасть на 10-15%. Продвинутые системы имеют температурную компенсацию, но ее нужно активировать и проверить. В старых системах требуется периодическая recalibration или установка принудительного охлаждения шкафа управления.
Наконец, пятая ошибка — попытка использовать один режим управления для всего цикла. Часто технологический процесс требует разного поведения привода на разных этапах: быстрый разгон, медленное рабочее движение, быстрое торможение. Попытка усреднить настройки приводит к компромиссу, который не удовлетворяет ни одному этапу. Используйте возможность переключения наборов параметров (Gain Scheduling) в зависимости от позиции или скорости. Это позволяет оптимизировать контроль момента для каждой фазы движения отдельно.
Предостережение: Никогда не полагайтесь только на визуальный осмотр работы механизма. Используйте осциллограф или встроенный анализатор приводов для записи графика момента в реальном времени. То, что выглядит плавно глазу, на графике может выглядеть как пила.
Будущее развития: нейросети и цифровые двойники
Глядя в ближайшее будущее, можно утверждать, что эволюция систем контроля момента пойдет по пути глубокой интеграции с концепцией Индустрии 4.0. Уже сейчас появляются решения, где цифровой двойник (Digital Twin) механической части используется для предварительного расчета оптимальных профилей момента. Перед запуском реальной машины виртуальная модель прогоняет тысячи циклов, предсказывая резонансы и усталостные нагрузки. Эти данные загружаются в контроллер в качестве начальных установок, сокращая время пусконаладки с дней до часов.
Нейросетевые алгоритмы начнут играть ключевую роль в прогнозировании отказа механики. Анализируя микро-изменения в форме кривой момента при осцилляции, ИИ сможет заметить износ подшипника или появление трещины в шестерне за недели до катастрофического отказа. Например, появление небольшой асимметрии в пике момента при прямом и обратном ходе может указывать на односторонний износ направляющих. Система сама предложит снизить скорость или момент до проведения ТО, предотвращая простой линии.
Также ожидается развитие распределенного интеллекта. Вместо центрального контроллера, управляющего всеми осями, каждый привод станет автономным агентом, обменивающимся данными с соседями по сети TSN (Time Sensitive Networking). Это позволит реализовать сложные координационные движения, где контроль момента распределяется между несколькими двигателями, работающими на одну нагрузку, с точностью синхронизации в наносекунды. Для крупных осциллирующих порталов это станет революцией, устраняющей перекосы и заклинивания.
Однако, несмотря на все технологические чудеса, фундаментальные законы физики останутся неизменными. Никакой алгоритм не компенсирует плохо собранную механику или неверный выбор оборудования. Автоматический контроль крутящего момента при колебательном движении в 2026 году — это симбиоз качественного «железа», грамотного инжиниринга и передового ПО. Инвестиции в каждый из этих компонентов одинаково важны для достижения результата.
Роль комплексного интегратора: опыт ООО «Юйхуань Фанбо Машинери»
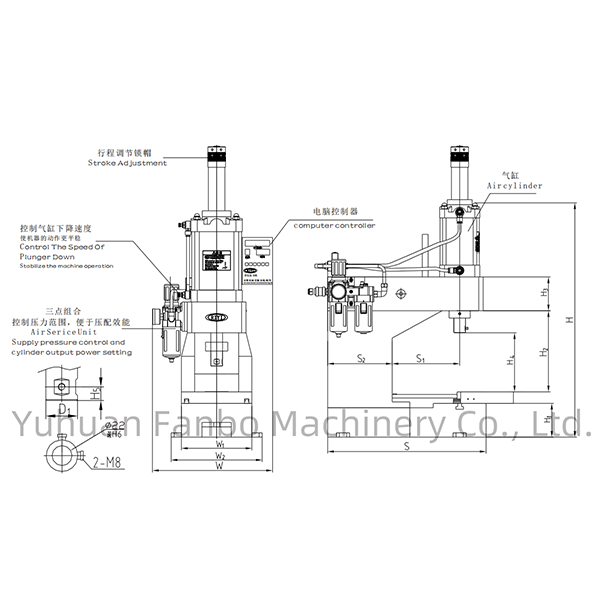
Успешная реализация описанных выше технологий невозможна без надежного партнера, способного объединить передовую теорию с практикой производства. Ярким примером такого подхода является компания ООО «Юйхуань Фанбо Машинери» (Yuhuan Fangbo Machinery). Основанная в 2006 году в промышленном центре Чумен (провинция Чжэцзян, Китай), эта высокотехнологичная компания за 19 лет прошла путь от локального производителя до международного поставщика прецизионного оборудования, экспортируя свои решения более чем в 20 стран, включая Германию, Японию и США.
В контексте задач автоматического контроля момента при осцилляции, опыт «Юйхуань Фанбо» особенно ценен. Компания не просто производит станки, а создает комплексные интегрированные системы, где механика, электроника и ПО работают как единый организм. Располагая собственным исследовательским центром и штатом из более чем 80 специалистов (инженеров-конструкторов, технологов и программистов ЧПУ), компания разработала уникальные серии оборудования, такие как роторные клепальные станки (серии FBY-XFC, FBY-RRC30B) и прецизионные сервопрессы. Именно в этих машинах реализованы принципы адаптивного управления моментом, о которых шла речь в предыдущих разделах.
Например, в сериях электрических сервопрессов и испытательных стендов компании используются продвинутые алгоритмы компенсации инерции и подавления резонанса, позволяющие достигать точности позиционирования и контроля усилия, необходимых для аэрокосмической и автомобильной промышленности. Производственная база площадью 5000 кв. м оснащена современным парком станков с ЧПУ и системами цифрового контроля, что гарантирует высокую повторяемость характеристик каждого изделия. Каждое устройство проходит многоуровневое тестирование под нагрузкой, включая проверку динамических характеристик при осциллирующих режимах, что полностью соответствует требованиям стандартов 2026 года.
Главное преимущество сотрудничества с такими компаниями, как «Юйхуань Фанбо Машинери», заключается в полном цикле поддержки: от концептуального проектирования и создания прототипов под конкретную задачу заказчика до пусконаладки на объекте и послепродажного сервиса. Гибкость производственной системы позволяет адаптировать типовые решения (например, четырехколонные прессы серии FBSY) под уникальные требования клиента, внедряя индивидуальные алгоритмы контроля момента. Это критически важно, ведь, как мы выяснили, копирование настроек с одного станка на другой часто невозможно из-за различий в механике и условиях эксплуатации.
Часто задаваемые вопросы
Какова минимальная частота обновления данных для эффективного контроля момента при осцилляции?
Для надежной работы при частотах колебаний выше 2 Гц минимальная частота обновления контура момента должна составлять 4 кГц (период 250 мкс). Для высокоскоростных приложений (выше 5 Гц) требуется 8-16 кГц. Использование систем с частотой ниже 1 кГц приведет к фазовому запаздыванию и потере устойчивости системы.
Можно ли реализовать точный контроль момента на асинхронном двигателе без энкодера?
Точность будет недостаточной для ответственных осциллирующих процессов. Без обратной связи по положению (энкодера) погрешность оценки момента на низких скоростях и при реверсе может достигать 15-20%. Для задач, требующих точности лучше 5%, использование двигателя с замкнутым контуром (серво или асинхронный с энкодером) является обязательным условием.
Как влияет длина вала на настройку системы контроля?
Длинный вал снижает собственную частоту крутильных колебаний системы, делая её более подверженной резонансу. Это требует снижения полосы пропускания регулятора момента, что ухудшает быстродействие. В таких случаях необходимо использование наблюдателей состояния (observers) для компенсации крутильной податливости или установка демпферов на валу.
Обязательно ли использовать внешние датчики момента?
Не всегда. Современные алгоритмы оценки момента по току статора (Motor Torque Estimation) обеспечивают точность до 3-5% от номинала, что достаточно для большинства задач. Внешние тензодатчики требуются только для сверхвысокой точности (менее 1%) или когда передаточное число редуктора велико и вносит существенные потери на трение, искажающие связь между током двигателя и моментом на выходе.
Что делать, если система входит в резонанс при определенной частоте осцилляции?
Необходимо активировать функцию режекторного фильтра (Notch Filter) в приводе. Сначала проведите спектральный анализ сигнала тока или скорости для выявления резонансной частоты. Затем настройте фильтр на эту частоту с appropriate шириной полосы. Если резонанс меняется в процессе работы, используйте адаптивный фильтр, который отслеживает частоту автоматически.
Внедрение системы, обеспечивающей автоматический контроль крутящего момента при колебательном движении, требует комплексного подхода и глубокого понимания специфики вашего производства. Ошибки на этапе проектирования могут стоить очень дорого, но правильный выбор технологии способен дать кратное преимущество в качестве и эффективности. Наша компания готова предоставить экспертную консультацию, провести аудит вашей текущей системы и предложить индивидуальные решения на базе передовых приводов 2026 года, опираясь на успешный опыт таких партнеров, как ООО «Юйхуань Фанбо Машинери». Мы работаем с проектами любой сложности, от модернизации одного узла до создания полностью автоматизированных линий под ключ.
Не позволяйте нестабильности момента тормозить развитие вашего бизнеса. Свяжитесь с нами сегодня для обсуждения деталей вашего проекта и получения персонализированного технико-коммерческого предложения. Помните, что точность момента сегодня — это качество вашей продукции завтра.
Для получения дополнительной информации о наших решениях в области сервоприводов, прецизионных прессов и систем управления движением посетите раздел Сервоприводы и системы точного контроля момента на нашем сайте.